Fuzzy Sliding Mode Control of a Flexible Spacecraft with Input Saturation
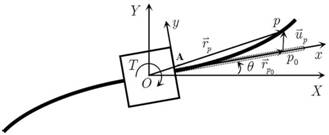
This research addresses the dynamic modeling and fuzzy sliding mode control (FSMC) for a spacecraft with flexible appendages. The control objective is attitude maneuver with large angle of rotation and simultaneous vibration control. To investigate the dynamic stiffening of rigid-flexible systems, a first-order approximate model (FOAM) of the flexible spacecraft system is formulated, taking into account the second-order term of the coupling deformation field. And a lower order simplified first-order approximate model (SFOAM) is derived by deleting the items related to axial deformation, which is used for controller design. Despite the advantages of sliding mode control (SMC) for nonlinear systems, classical SMC has a major problem in the form of chattering. For highly flexible structural model, ideal sliding surface producing pure rigid body motion may not be achievable. In this research, the discontinuity in sliding mode controller is smoothed inside a thin boundary layer by using fuzzy logic (FL) technique so that the chattering phenomenon is reduced efficiently. The most distinguished feature of SMC is claimed to result in insensitivity to parameter variations, and complete rejection of disturbances. This superb system performance only holds in the sliding mode domain (SMD) on the whole switching surfaces, which is easily satisfied without input constraints. However, when the amplitude of actuators is limited by physical constraints of the actuators, SMD will be restricted to some local domain near zero on the switching surface. Thus, control input saturation is also considered in the FSMC approach. The new features and advantages of the proposed approach are the use of new dynamic equations of motion of flexible spacecraft systems and the design of FSMC by taking into account the control input saturation. Numerical simulations are performed to show that rotational maneuver and vibration suppression are accomplished in spite of the presence of model uncertainty and control saturation nonlinearity.